 mechanical mechanisms
mechanical mechanisms
DoF Spherical Connection Control
« previous mechanism
 Contractible Eave
Contractible Eave
next mechanism »
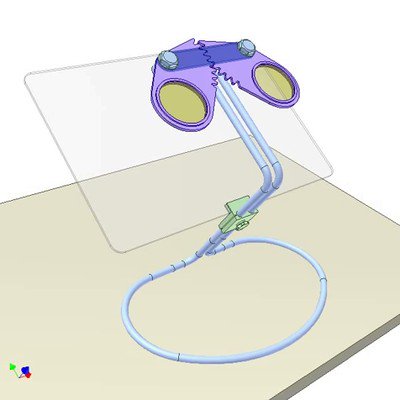 Table-Top Stereoscopic Viewer
Table-Top Stereoscopic Viewer