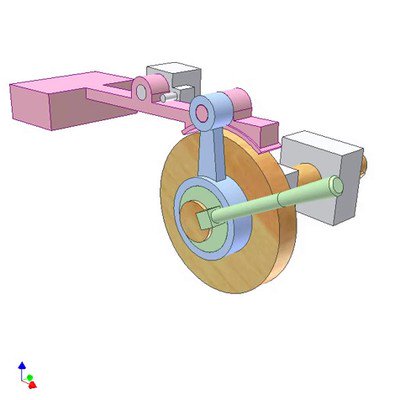
In this video the Bowden mechanism is used for motion transmission to a shaft, position of which is variable in relation with the base. It is for 2 DoF robot.
Both motors are grounded.
Brown motor controls blue arm rotation.
Orange motor controls yellow arm rotation via a Bowden mechanism that consists of green and yellow pulleys, black cable and brown flexible tube.
Ways to avoid cable sliding on the pulleys:
- Tension screw as shown in this video (cyan screw).
- Spring placed between the base and violet slider.
- Fixing the cable to the pulleys at a point, if the pulley rotations is small.
- Wrapping the cable more than one revolution around the pulleys if the pulley rotations is small.
Transmission ratio can differ from 1 if the pulleys diameters are different.
For a robot of more DoF, several similar Bowden mechanisms can be used. Advantage: they operate independently from each other.
 mechanical mechanisms
mechanical mechanisms
 Shaft Brake
Shaft Brake
 Converting Polar Coordinates to Cartesian Coordinates
Converting Polar Coordinates to Cartesian Coordinates