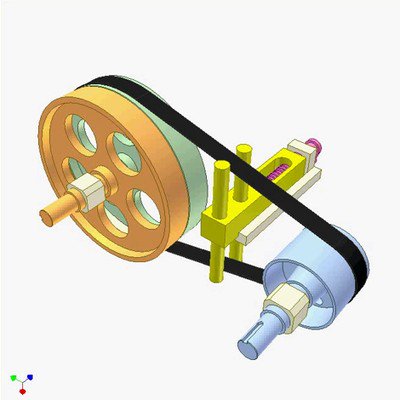
Input: pink pinion.
Output: blue pinion.
They are of equal tooth number.
Green and yellow pinions rotate idly.
Green pinion engages with yellow and blue pinions.
Yellow pinion engages with green and pink pinions.
Tooth numbers of green and yellow pinions can be arbitrary.
The input and output rotate in opposite directions.
Their speeds are equal.
This mechanism is used instead of 3 bevel gear drive to avoid using perpendicular shafts.
 mechanical mechanisms
mechanical mechanisms
 Wobbling Disk Mechanism
Wobbling Disk Mechanism
 Belt Clutch
Belt Clutch