Yellow head is controlled by three step motors via screw drives and spatial linkages. Green and pink bars create 3 parallelogram mechanisms. In some designs the revolution joints between them are replaced with spherical ones.
The video shows the head motion from central position when three blue input sliders move with the same displacement, first one after another and then at the same time.
The head is kept always horizontal and moves without rotation. By combination of positions of the input sliders the head can reach any position in 3D space. However, the calculation is not simple.
It can be used for 3D printers, pick and place devices.
See a real mechanism:
/watch?v=AYs6jASd_Ww
 mechanical mechanisms
mechanical mechanisms
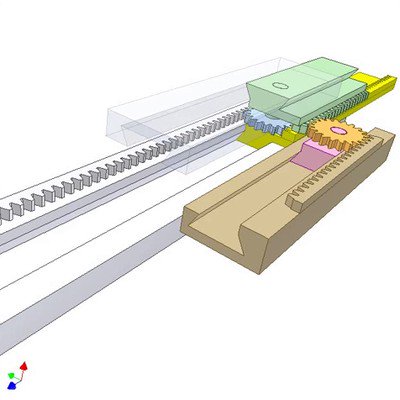 Gear Rack Drive for Increasing Stroke Length
Gear Rack Drive for Increasing Stroke Length
 Web-Cutting Mechanism
Web-Cutting Mechanism