 mechanical mechanisms
mechanical mechanisms
Geared Spherical Wrist Mechanism
« previous mechanism
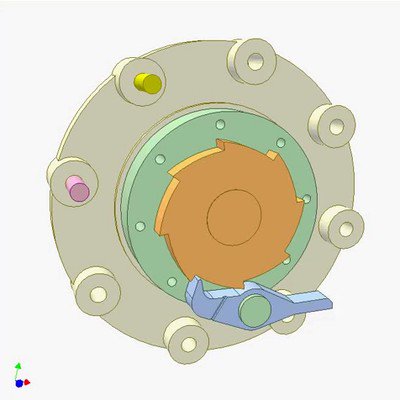
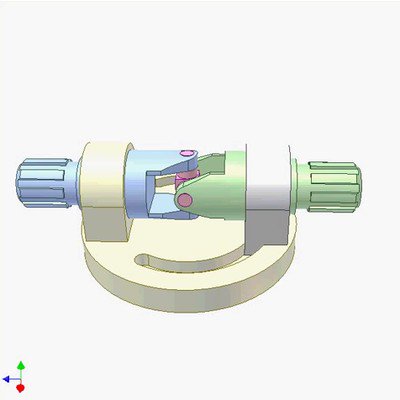 Study of Cardan Universal Joint
Study of Cardan Universal Joint
next mechanism »
 Ratchet Mechanism
Ratchet Mechanism