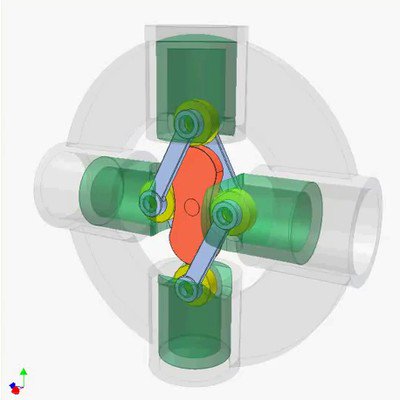
Two chain drives are arranged with a large non-coaxiality A.
The yellow link connects two drives by two red chain pivot links. Center distance between two revolution joints of the yellow link is equal to A.
The direction of the yellow link is kept unchanged during motion. More of the connecting links and the pivot links is possible.
This mechanism can be applied for continuous lift.
 mechanical mechanisms
mechanical mechanisms
 Cam Mechanism of Follower's Planar Motion
Cam Mechanism of Follower's Planar Motion
 Geneva Mechanism
Geneva Mechanism