Input: rotary motion of blue slider-crank.
Output: reciprocating linear motion of the blue slider-crank.
Pink curve is the trajectory of center of spherical joint between the two links. It is the intersection of a spherical surface (its radius = length of green bar) and a cylindrical one (its radius = radius of the blue crank).
 mechanical mechanisms
mechanical mechanisms
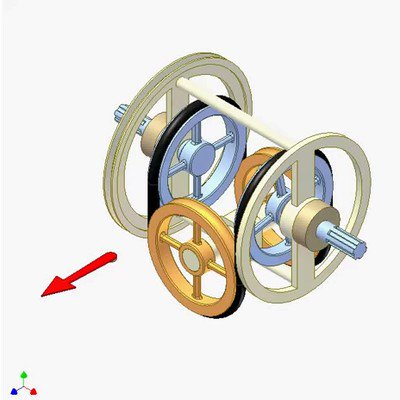 Car Differential With Belt
Car Differential With Belt
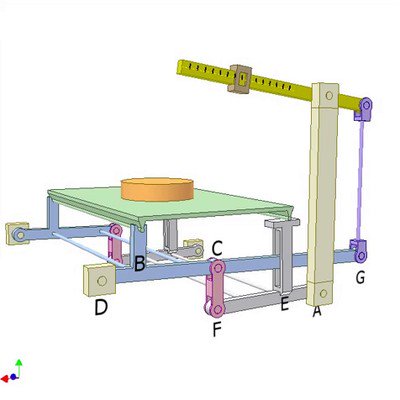 Platform Weighing Scale
Platform Weighing Scale