Spherical R Mechanism
« previous mechanism
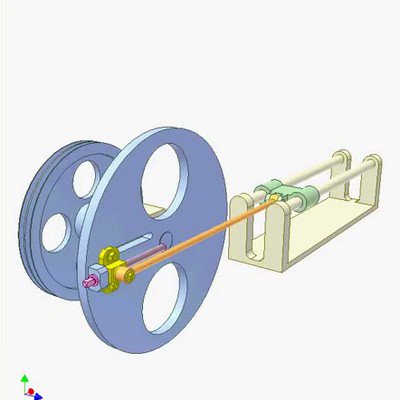 Mechanism for Adjusting Crank Radius
Mechanism for Adjusting Crank Radius
next mechanism »
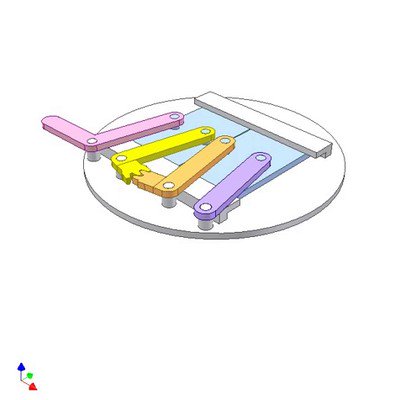 Diaphram Shutter
Diaphram Shutter
 mechanical mechanisms
mechanical mechanisms
Let's make mechanical mechanisms great again!
« previous mechanism
Mechanism for Adjusting Crank Radius
next mechanism »
Diaphram Shutter