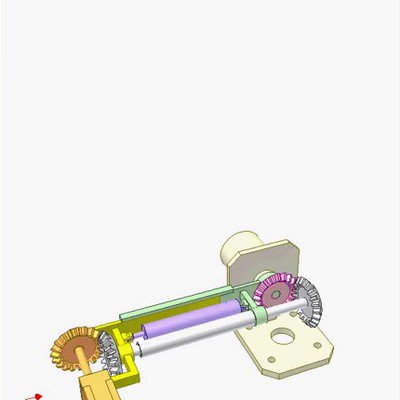
It is used for rotation transmission between the shafts, relative position of which in space is arbitrary.
Unusual thing: two links are connected together via two joints (not one joint):
- Yellow part is connected to the input pink shaft via a spherical joint and a point-on-plane joint.
- Yellow part is connected to the output green shaft via a point-on-line joint and a point-on-plane joint.
The simulation shows that it is a constant velocity joint except the case when the input and outpot shafts are skew.
The video shows case when the shafts intersect with one another at angle of 15 deg.
 mechanical mechanisms
mechanical mechanisms
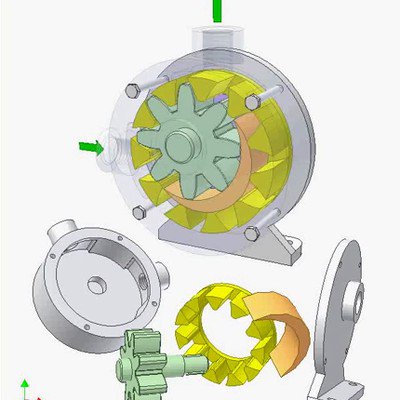 Internal Gear Pump
Internal Gear Pump
 Keeping Direction Unchanged During Motion
Keeping Direction Unchanged During Motion