Universal Joint of Links
« previous mechanism
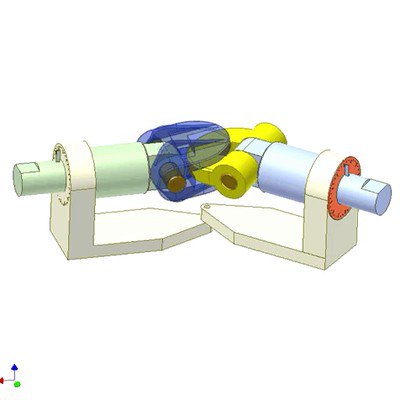 Universal Joint
Universal Joint
next mechanism »
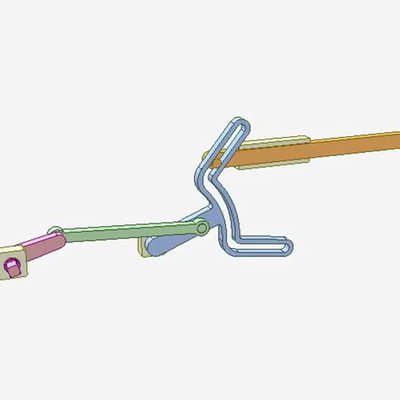 Tangent Mechanism of Curved Slot
Tangent Mechanism of Curved Slot
 mechanical mechanisms
mechanical mechanisms
Let's make mechanical mechanisms great again!
« previous mechanism
Universal Joint
next mechanism »
Tangent Mechanism of Curved Slot